CAR 1, LVG 23, LMB 3
PROPUESTA COCHE 1
PROPUESTA COCHE 1



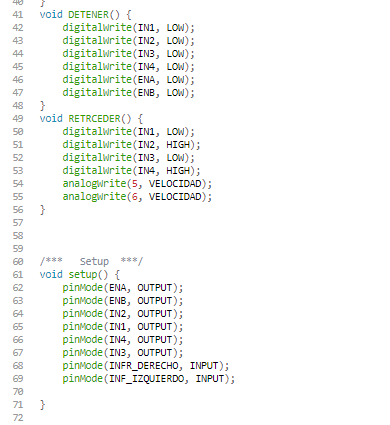
Este código ha sido explicado posteriormente en la entrada anterior.
PROPUESTA COCHE 2 (BUSCA LINEA)



PROPUESTA COCHE 2 (BUSCA LINEA)



El principio del código es igual que el anterior excepto por el hecho de que tenemos una variable más llamada ACCIÓN. Cuando cambia es en el loop:
Para empezar, el los sensores leen el valor digital de su pin.
Posteriormente se abre un gran bloque que abarca lo siguiente:
-Si los sensores leen cero, entonces la variable ACCIÓN vale 0 y retrocede, por último se cambia la variable a 1
-Si siguen leyendo 0, entonces la variable es 1 y gira a la izquierda, por último cambia la variable a 2
-Si siguen leyendo 0, entonces la variable es 2 y gira dos veces a la derecha ( uno para ir a la posición inicial y otra para girar a la derecha) y cambia la variable a 3.
-Si por último los sensores siguen leyendo 0, entonces la variable es 3 y se detiene el coche.
lo que resta es igual que en el código anterior.